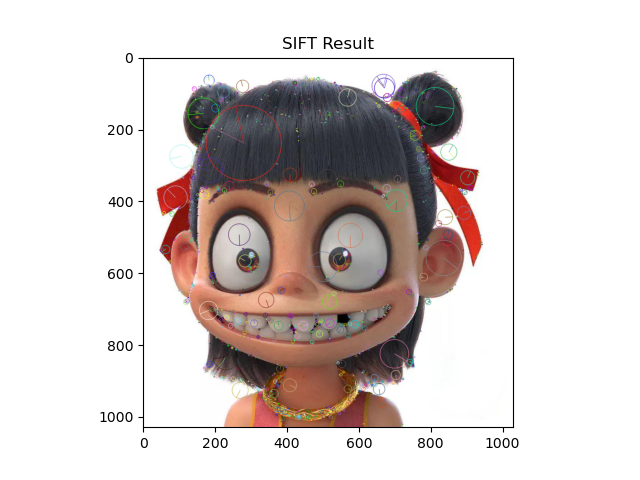
SIFT 图像特征匹配算法
SIFT简介
SIFT(Scale-Invariant Feature Transform,尺度不变特征变换匹配算法)是一种高效区域检测算法。
SIFT算法可以解决的问题:
- RST(Rotation Scale Translation):图像的旋转、缩放、平移等变换
- 图像的仿射变换(Affine Transformation):图像的拉伸、压缩、扭曲等变换
- 图像的光照变化
- 目标部分遮挡
- 杂物和噪声干扰
SIFT算法原理
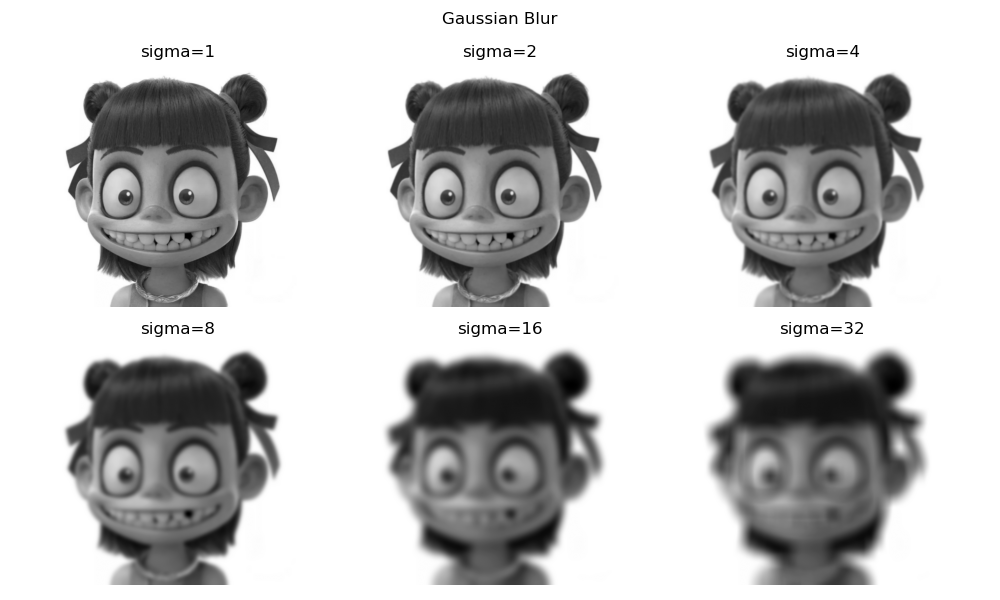
1. 高斯滤波
一个图像的尺度空间$L$是高斯函数$G(x,y,\sigma)$与图像$I(x,y)$的卷积:
其中,$G(x,y,\sigma)$是高斯函数,$\sigma$是尺度因子,$*$是卷积运算,$x_0,y_0$是高斯函数的中心(卷积核的中心)。
$\sigma$越小,图像被平滑的越少,图像的细节越多。
小尺度对应于图像的细节,大尺度对应于图像的整体特征。
2. 高斯金字塔

高斯金字塔包含多组(Octave)图像,每组图像由多层(Interval)不同尺度的高斯模糊图像组成。
构建过程:
- 将原图像扩大到两倍,作为第0组的第0层
- 对第0组的第0层进行$\sigma_0$的高斯模糊,得到第0组的第1层
- 选定一个比例系数$k$,对第0组的第1层进行$k\sigma_0$的高斯模糊,得到第0组的第2层
- 对第0组的第2层进行$k^2\sigma_0$的高斯模糊,得到第0组的第3层,以此类推…
- 将上一组倒数第3层图像做比例因子为2的降采样,得到下一组的第0层,重复步骤2-4
组数计算公式:$O=\lfloor\log_2(\min(M,N))\rfloor-3$
- $M,N$:原图像的长宽
层数公式:$S=n+3$
- $S$是每组的层数(自设)
- $n$是最终想在差分金字塔中提取极值点的层数(见差分金字塔)
平滑因子公式:$\sigma(o,r)=\sigma_0 2^{o+\frac{r}{n}}$,其中$o$是组数,$r$是层数
- SIFT算法中,$\sigma_0=1.6$。但由于相机具有初始模糊$\sigma_0=0.5$,实际$\sigma_0=\sqrt{1.6^2-0.5^2}=1.52$
- 第o层的初始平滑因子$\sigma(o,0)=2^o\sigma_0$
- $k=2^{1/n}$

金字塔内各图片的关系:
- 在同一组内,不同层图像的尺寸是一样的,后一层图像的高斯平滑因子σ是前一层图像平滑因子的k倍
- 在不同组内,后一组第一个图像是前一组倒数第三个图像的二分之一采样,图像大小是前一组的一半
3. 高斯差分金字塔与极值点检测
3.1 高斯差分金字塔
对高斯金字塔的每一组图像,计算相邻两层图像的差分,得到高斯差分金字塔(DoG, Difference of Gaussian)。
3.2 估计极值点
将每个像素点和它在3×3×3的邻域内的26个像素点进行比较。
如果这个点是这27个点中的最大值或最小值,则认为这个点是一个极值点。
DoG金字塔是离散的(因为尺度空间和像素点都是离散的),所以找到的极值点不太准确的,很大可能在真正极值点附近,因此需要对每个极值点进行插值。
3.3 泰勒展开求精确极值点
对每个极值点$X_0(x_0,y_0,\sigma_0)^T$,进行三元二次泰勒展开:
将$f(X)$对$X$求导:
导数为0时,解得极值点:
代入$f(X)$得到极值:
3.4 去除低对比度点
舍去$|f(X_0)|<\dfrac{T}{n}, T=0.04$的极值点,因为这些点对应的差分值太小,对比度低,不具有代表性。
3.5 去除边缘响应
DoG在边缘会有比较大的值(边缘响应强),但边缘不一定能够提供稳定的特征,因此需要去除边缘响应强的点。
对于每个极值点,计算Hessian矩阵的迹和行列式:
其中:
- $\alpha$为较大的特征值,$\beta$为较小的特征值
- $\alpha = r \beta$,$r$是一个大于1的实数
过滤:
- $Det(H)<0$
- $\dfrac{(Tr(H))^2}{Det(H)}\ge (r+1)^2/r$,论文推荐值$r=10$
4. 关键点方向分配
- 0~360度划分为36 bins,每个bin为10度
- 在高斯金字塔找到关键点对应位置,以它为圆心,半径为$1.5\sigma$画圆
- 统计圆中所有像素的梯度方向、梯度幅值(模),直方图平滑处理,用$1.5\sigma$进行高斯加权
- 平滑处理:防止某个梯度方向角度受噪声干扰等因素突变
- 高斯加权:使特征点附件的梯度幅值具有更大的权重,弥补因没有仿射不变性而导致的特征不稳定
- 统计出数值最高的梯度方向,作为主方向;保留大于主方向80%的方向作为辅方向
梯度方向和梯度幅值的计算:
高斯加权公式:
- $i,j$是像素点到关键点的距离
5. 关键点描述
描述符是一组向量,用于描述特征点及其领域点的特征,以便更好地与其他图片匹配
- 将坐轴标移到关键点方向
- 将特征点的领域划分为$d\times d$个子区域,每个子区域大小为$m\sigma\times m\sigma$,并划分为8个方向。论文推荐值:$m=3$,$d=4$
- 每一个子块进行8个方向的直方图统计操作,共$d\times d\times 8=128$个bin,得到一个128维的特征向量(描述符)
6. 特征点匹配
分别对模板图(参考图,reference image)和实时图(观测图,observation image)建立关键点描述子集合。
目标的识别是通过两点集内关键点描述子的比对来完成,一般采用欧氏距离来衡量两个描述子之间的相似度。
可以使用KD树优化搜索过程。
SIFT实现
cv2中已经给出了SIFT算法的实现,可以直接调用。
1 | import cv2 |